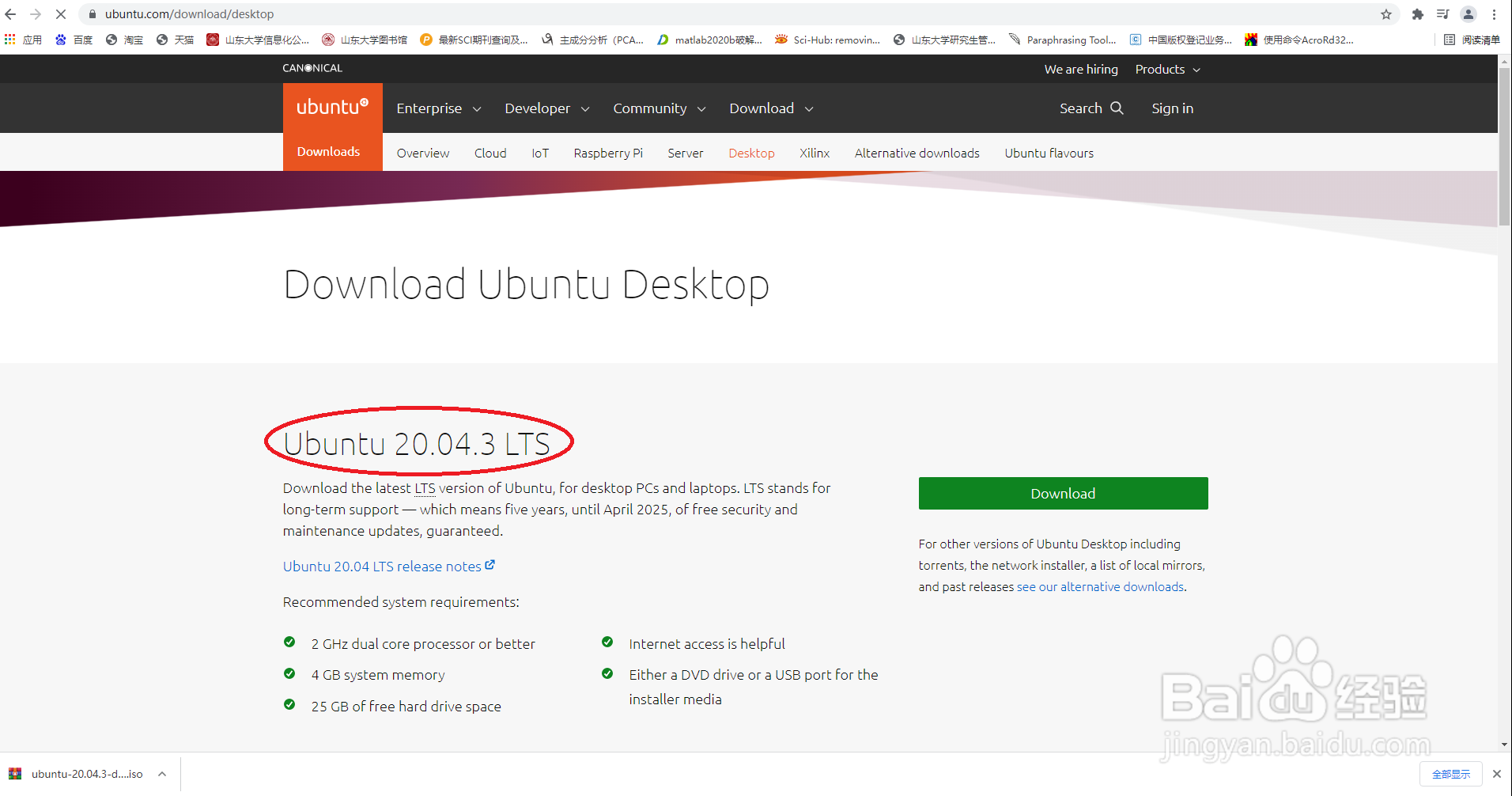
1、在ubuntu官网下载ubuntu 20.04 LTS安装包。
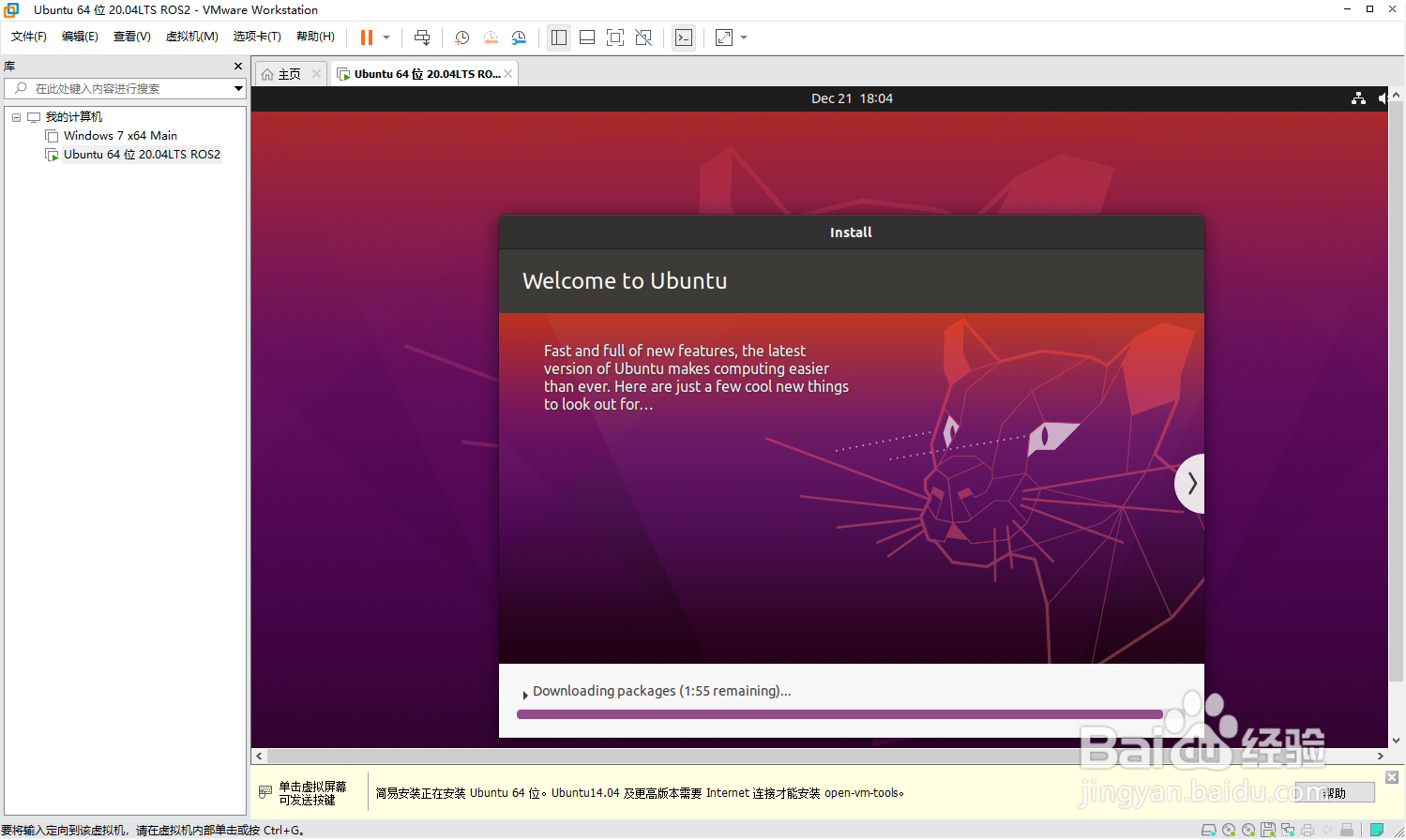
2、在vmware中新建一个虚拟机,然后安装ubuntu 20.04 LTS,安装过程十分简单,这里不再赘述。
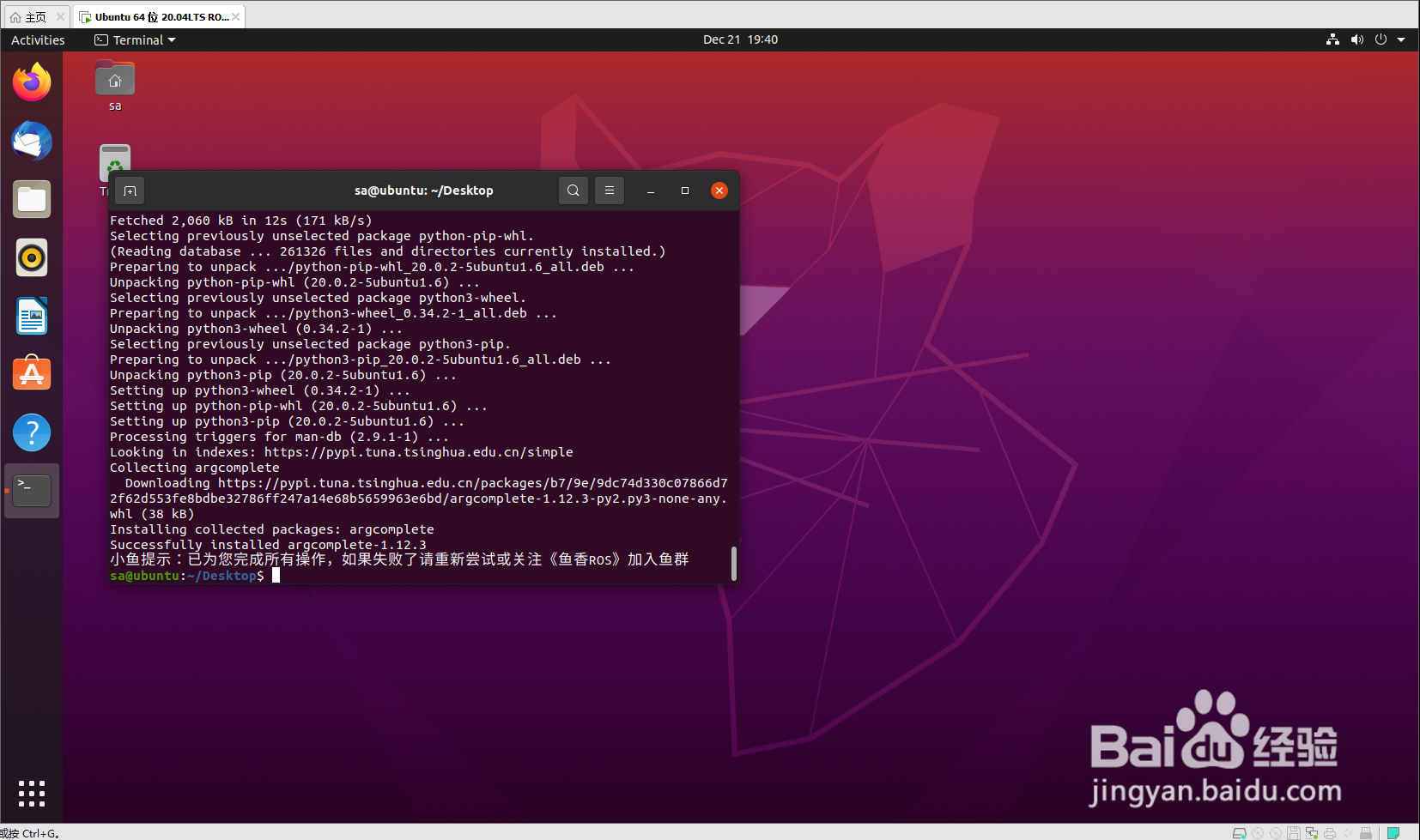
3、接下来安装ROS2,版本为foxy。这里强烈推荐博主“鱼香ROS”的文章,主页是https://fishros.com/,非常清新。我们在主页中找到《一行代码安装完成ROS2》这篇文章,复制其中的命令 sudo apt-get install curl && curl http://fishros.com/tools/install/ros-foxy | bash,到ubuntu20.04的终端中,运行。
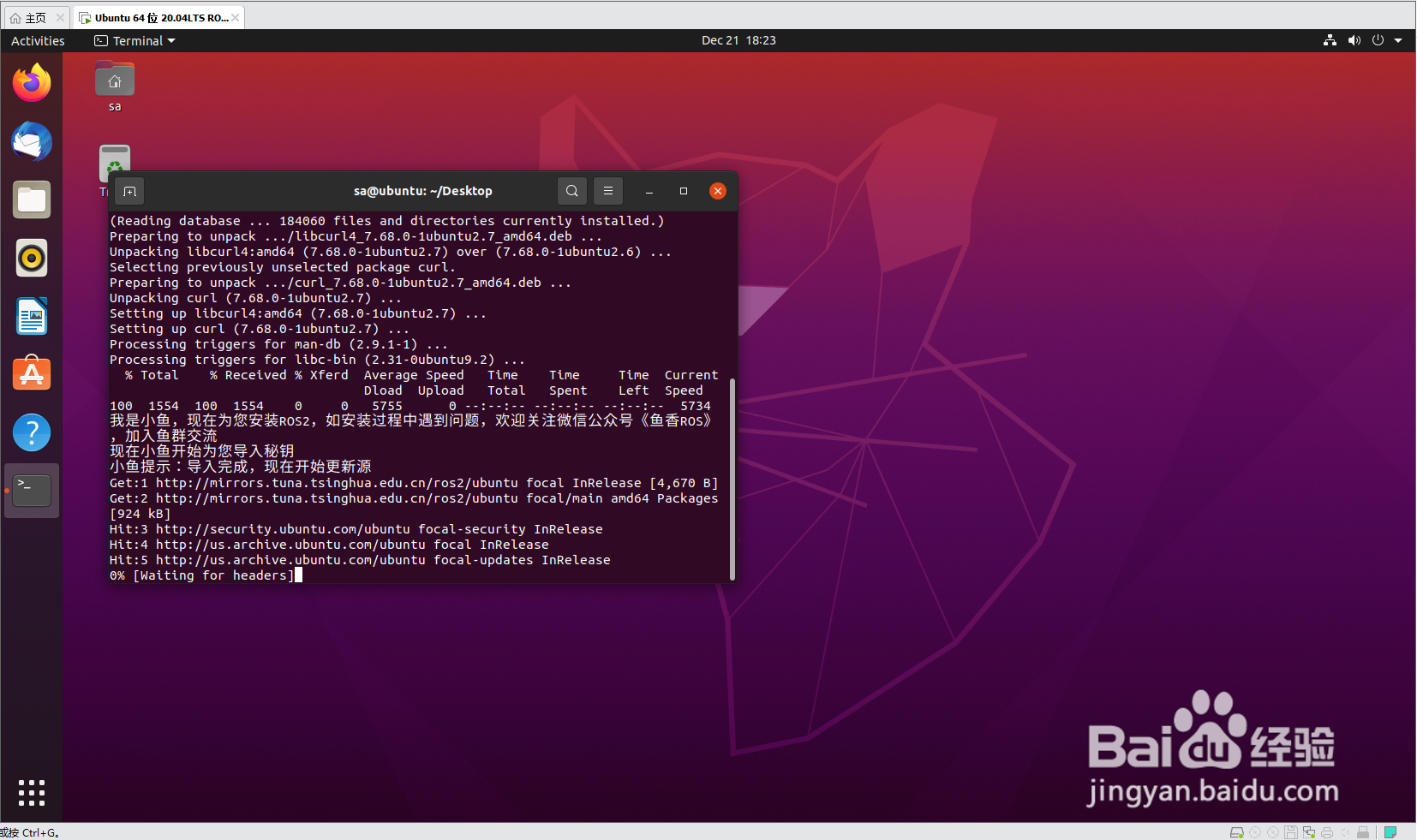
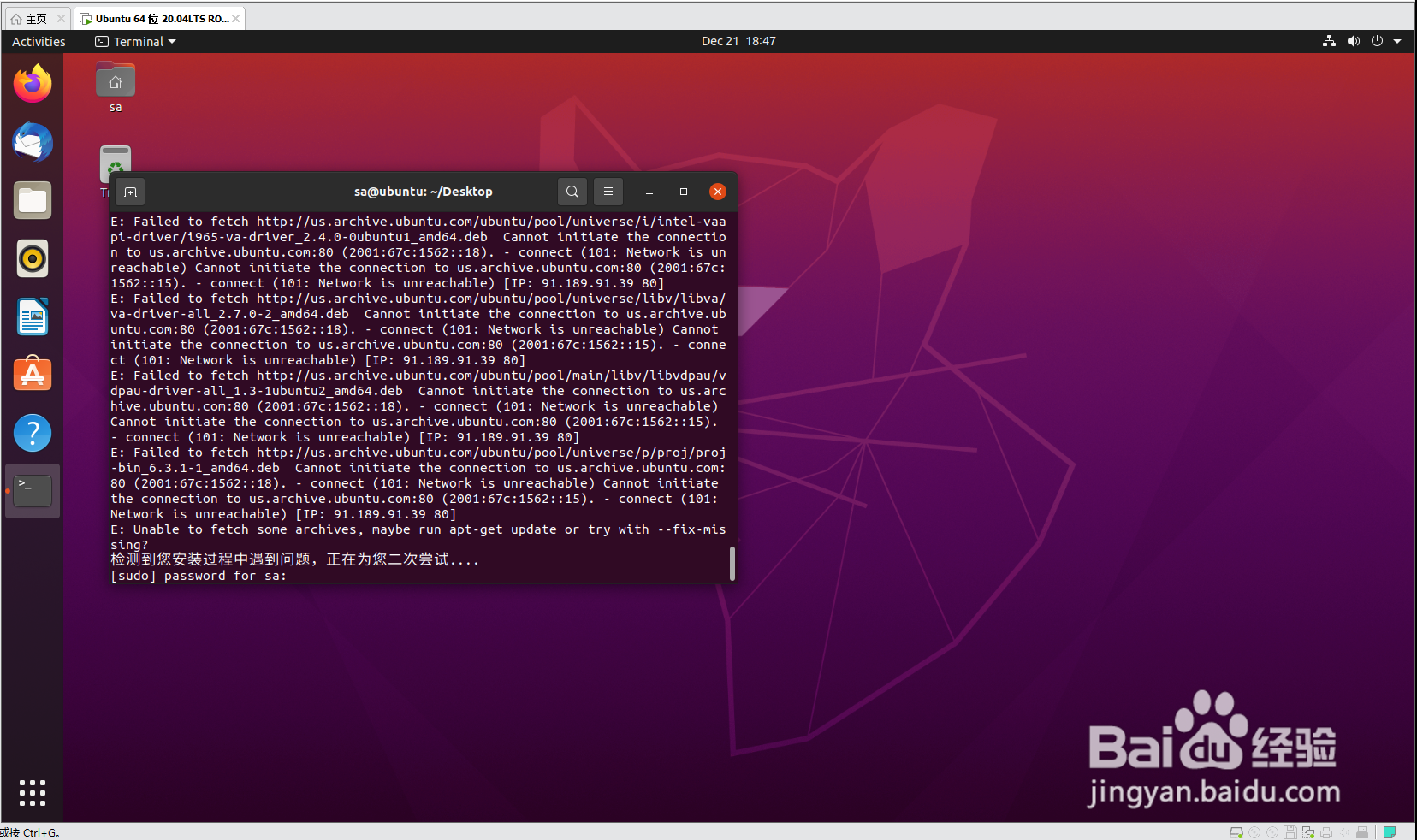
4、安装过程中如果有失败往往是网络的原因,切换网络试试。
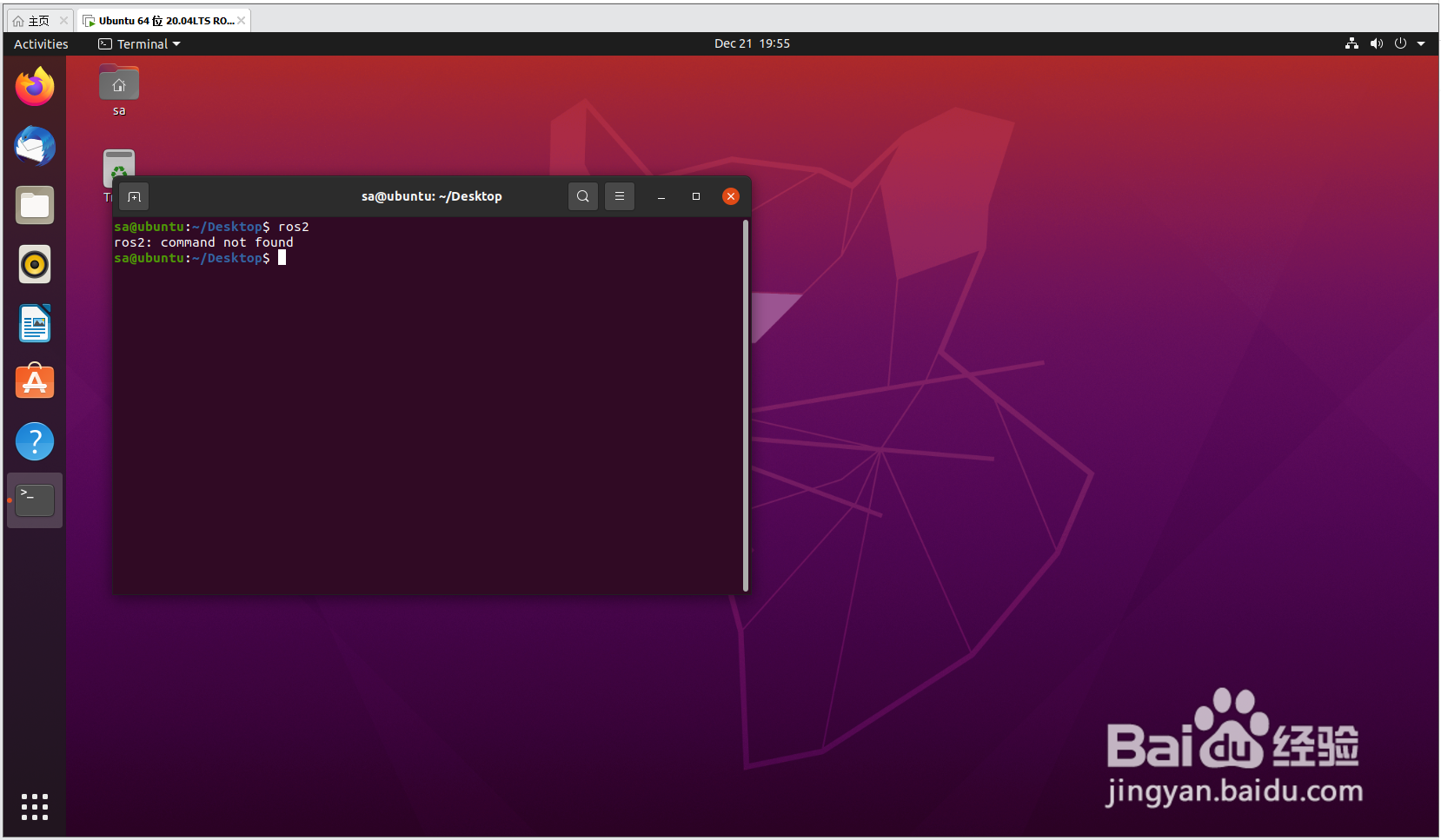
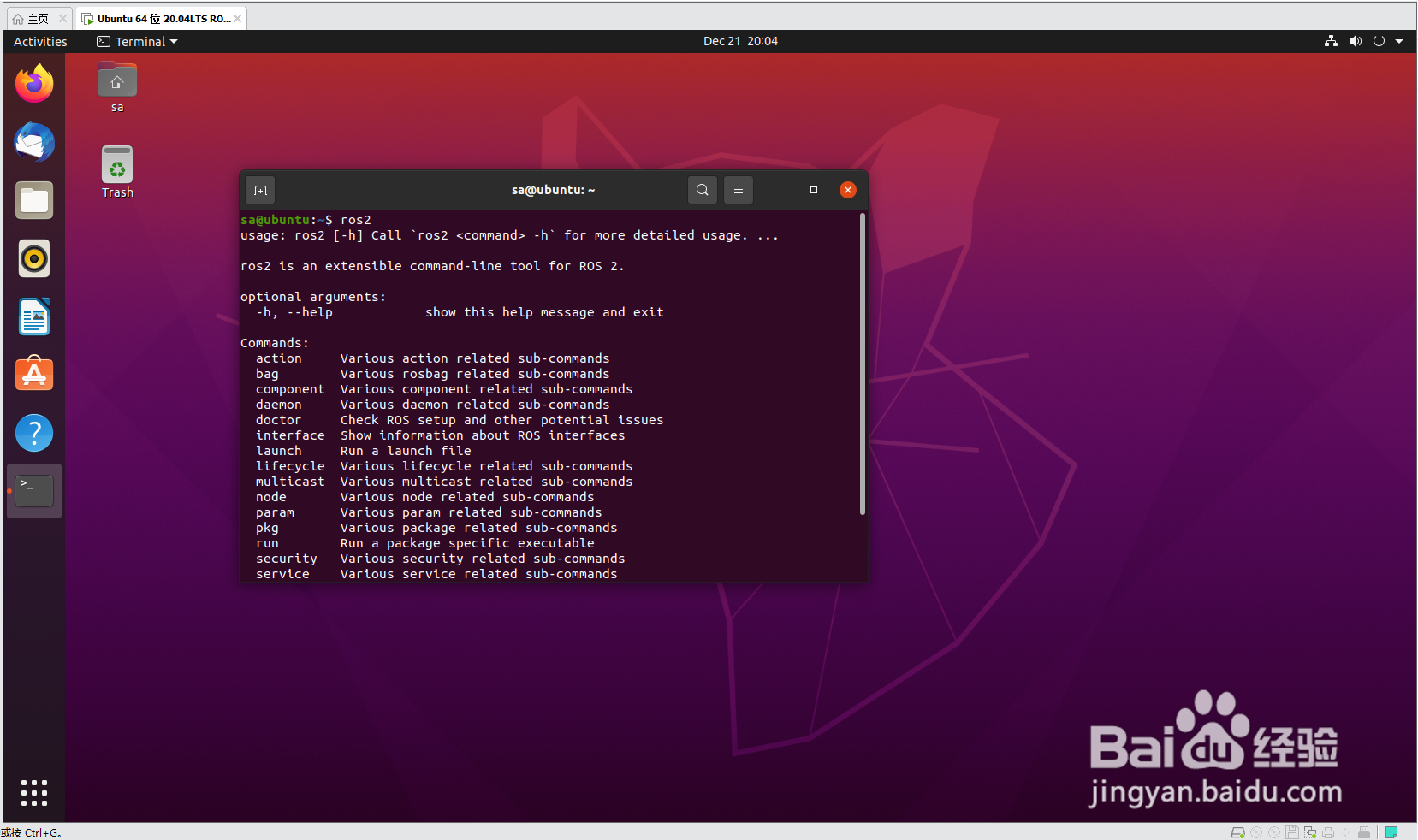
5、在终端中输入命令 ros2,看是否能启动ROS2。如果报 command not found 错误,请不要紧张,这在博主的文章中有特别说明,是脚本bug造成的。新开一个终端就好了。
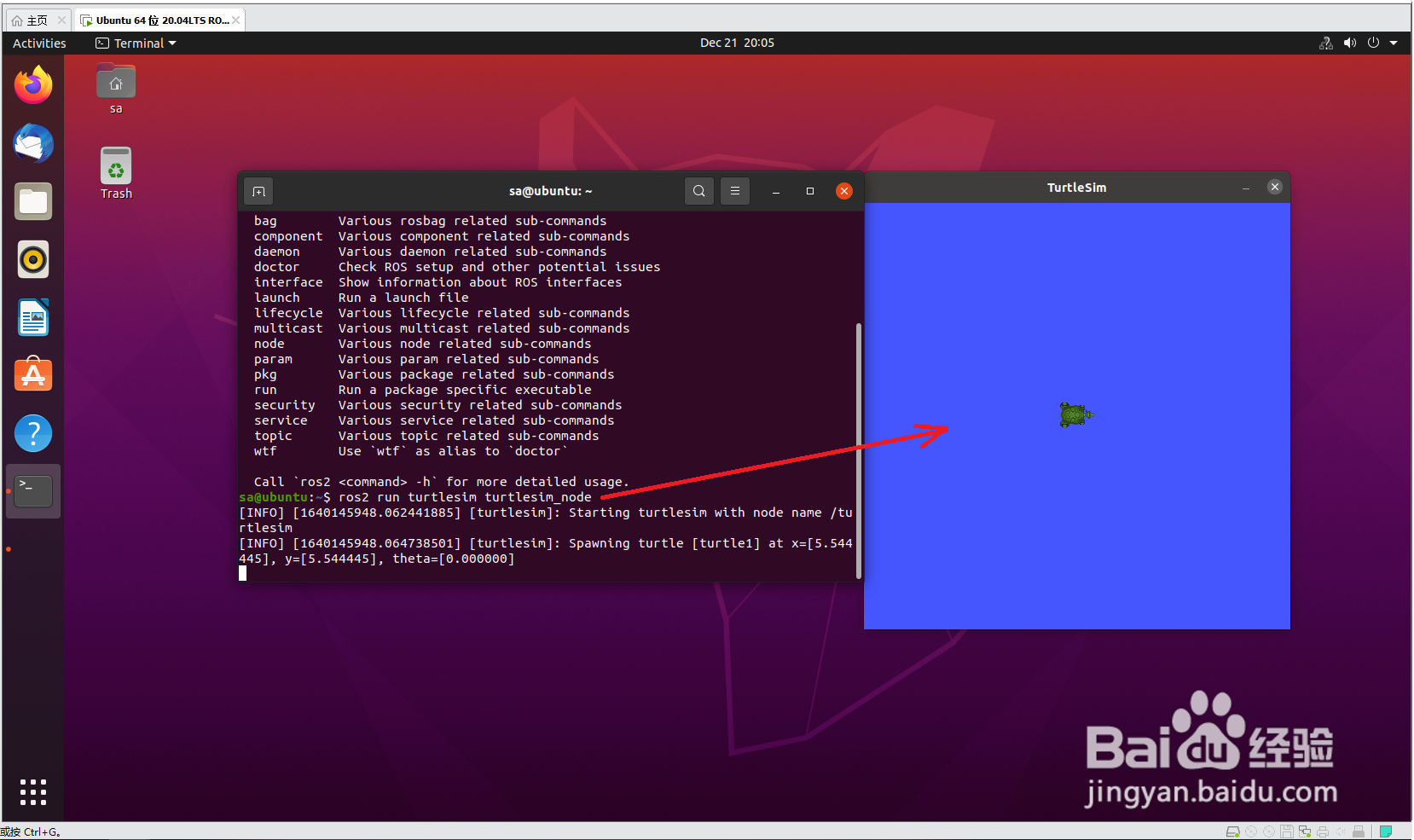
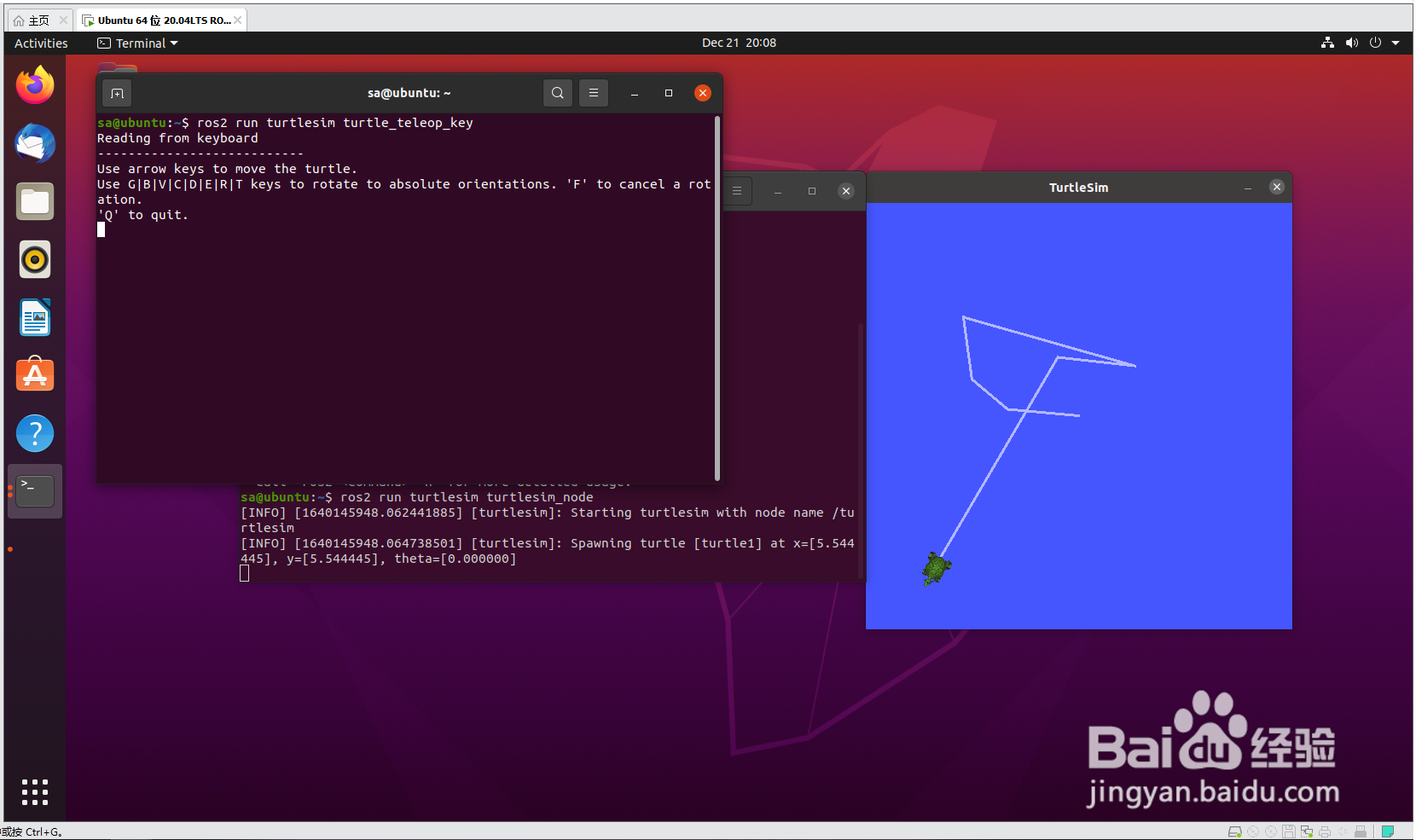
6、在终端中输入 ros2 run turtlesim turtlesim_node,经典的“乌龟模拟器”就打开了。新开一个终端,输入 ros2 run turtlesim turtle_teleop_key,可以用键盘的上下左右键控制乌龟的运动。说明ROS2已安装成功。