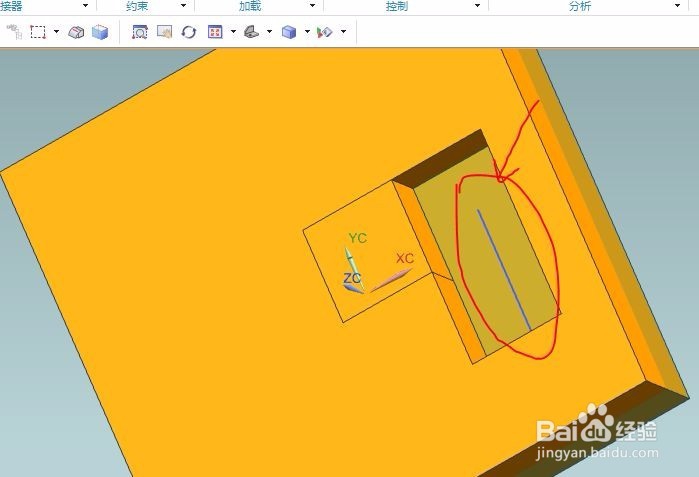
1、首先建立简单模型。在这里画了一个大基座,一个方块,和一条直线。此直线将作为啮合连杆(装配过程不需要任何约束)
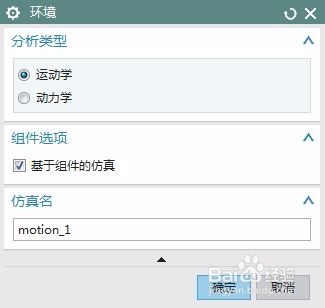
2、环境设置为如下图
3、设置3个连杆,此处连杆1为大基座且为 固定连杆;连杆2为方块;连杆3为直线。三者均不用设置质量等

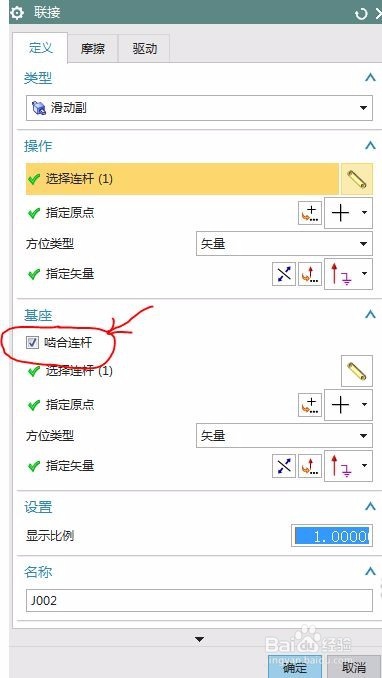
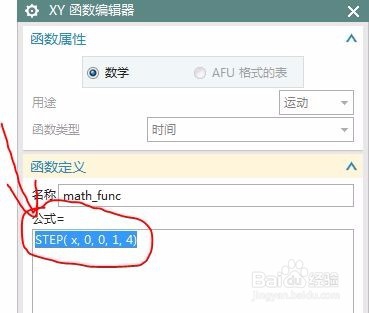
4、运动副J001在创建基座为固定连杆后就会自动生成无需设置。设置运动副J002为滑动副,操作连杆为方块,基座勾选啮合连杆为直线,二者原点和矢量方向一致。然后设置驱动,此处驱动设置为step函数(根据本运动仿真)

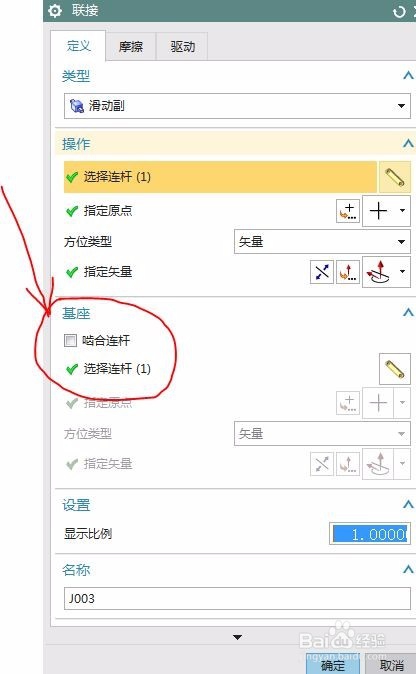
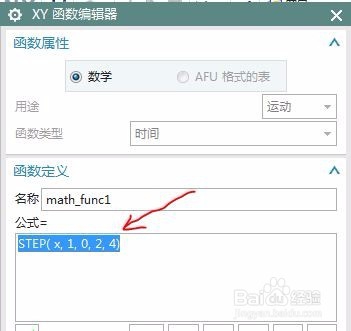
5、设置运动副J003为滑动副,此时操作连杆为直线,原点为上端点,矢量沿直线向下。基座连杆此时不勾选啮合连杆,选大基座。设置驱动,此处驱动设置为step函数(根据本运动仿真)
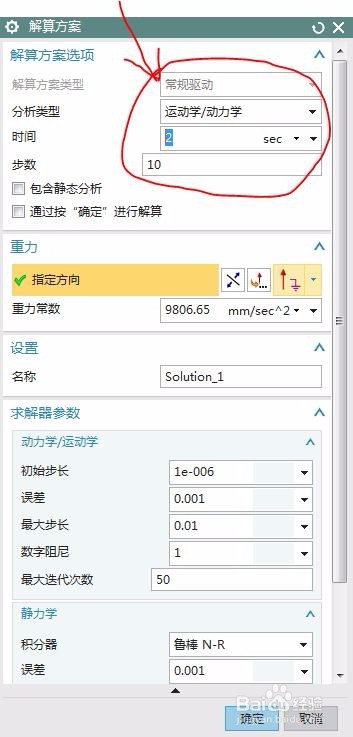
6、最后设置结算方案,根据本运动仿真时间为2s,步数不需要太多。确定后求解,观看动画即可看到方块沿垂直槽进行运动