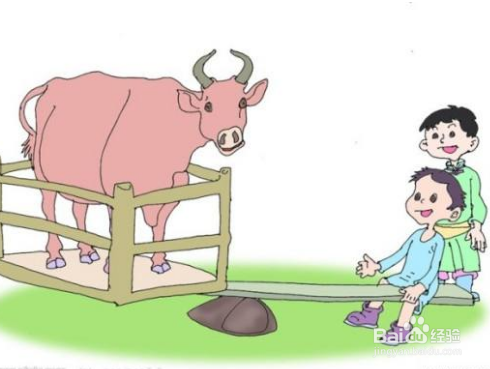
1、第一步 支点在动力点和阻力点的中间。既可能省力的,也可能费力的,主要由支点的位置决定,动力臂与阻力臂长度一致。例:跷跷板、天平等

2、第二步 阻力点在动力点和支点中间。由于动力臂总是大于阻力臂,所以它是省力杠杆。例:手推车,跳水板,钉书机等
3、第三步 动力点在支点和阻力点之间。特点是动力臂比阻力臂短,所以这类杠杆是比较费力,单能够缩短距离。例:鱼竿,锹,球棍等
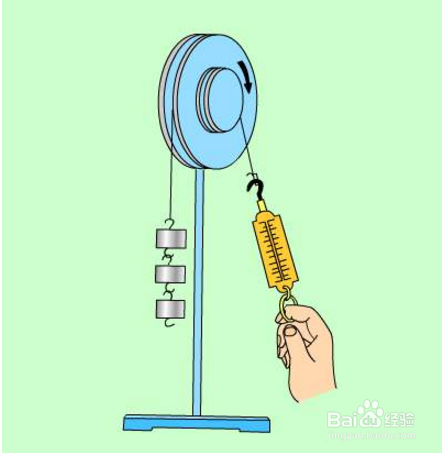
4、第四步 像轮轴这类的工具也属于一种变形杠杆。滑轮轴心好比支点,两端物体的拉力好比杠杆的两端施力,而如果滑轮是一个完美的圆,施力臂和阻力臂皆将是圆的半径。
1、杠杆是生活中必不可少的东西
2、很多的地方都可以用到。机械,建筑。生活
